在未来的生产生活中,智能化、多机协同的安全巡检是未来安全监测技术的重要发展方向。本设备是一款空-地协同智能巡检机器人系统,基于无人车与无人机,搭建了全天候的自主导航多类型机器人协作系统,确保可以全方位、全天候执行给定的导航和巡检任务。空-地协同智能巡检机器人系统是一款综合运用物联网、人工智能、云计算、大数据等技术,集成视觉环境感知、动态决策、行为控制和报警装置,具备自主感知、自主行走、自主保护、互动交流等能力,可帮助人类完成基础性、重复性、危险性的安保工作,推动安保服务升级,降低安保运营成本的多功能综合智能装备。
空-地协同智能巡检机器人系统示意图如下所示。
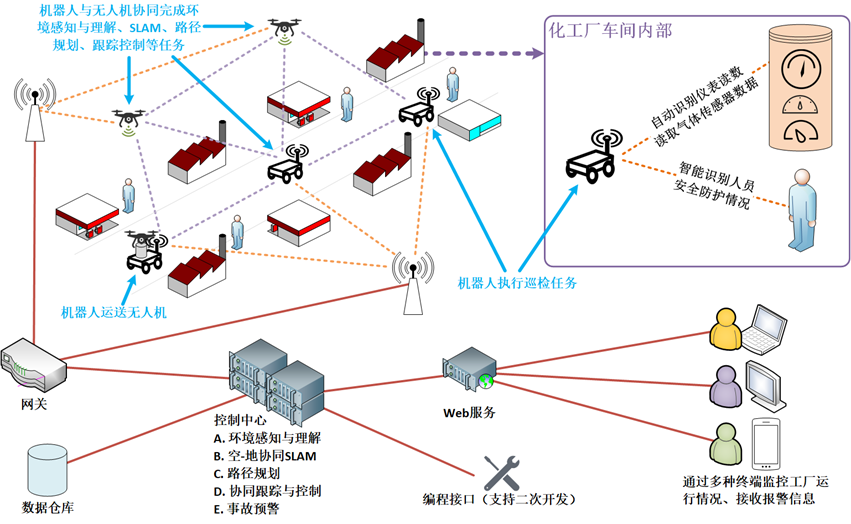
空-地协同智能巡检机器人系统示意图
1. 硬件配置
地面-无人车 | |
尺寸 | 750x550x250mm |
最大速度 | 1.5m/s |
最大负载 | ≥25kg |
最大爬坡角 | 30度 |
供电电压 | 24V |
工作温度 | -10℃~40℃; |
激光雷达 | 20米有效距离,扫描频率15Hz,数据采样率30kHz,精度±1cm |
电机 | 直流无刷电机 |
续航能力 | 连续工作时间8小时 |
驱动转向 | 四轮差速转向 |
控制方式 | 手柄/上位机串口 |
支持系统 | Windows/Linux/MacOX |
支持平台 | X86/ARM |
手柄遥控距离 | 20m |
手柄通信 | 2.4GHz |
无人机起降平台 | 650x500mm |
空中-无人机 | |
尺寸 | 98×92.5×41 mm(长×宽×高) |
桨叶 | 3 英寸 |
智能电池数量 | 2 |
内置功能 | 红外定高,气压计定高,LED指示灯,下视视觉,WiFi连接,高清720P图传 |
最大飞行速度 | 8 m/s |
最大飞行时间 | 8 分钟 |
最大飞行高度 | 30米 |
可拆卸电池 | 1.1Ah/3.8V |
相机 | 500万像素 HD720P30 支持电子防抖 |
wifi频段 | 2.4G 5.8GHz |
蓝牙 | 2.4G |
MCU | ESP32-D2WD ,双核主频 160MHZ,运算能力400MIPS |
开源性 | 支持SDK开发,支持Arduino、图形化编程、MicroPython 编程控制 |
拓展性 | 14pin 扩展口 (I2C,UART,SPI,GPIO,PWM,电源) |
可编程LED 灯 | 全彩LED |
测距点阵屏扩展模块 | 尺寸 35.3 x 31.5 x 8.6mm 可编程点阵LED 8*8红蓝双色 点阵驱动功能 IIC接口、自动点阵扫描、全局亮度256级可调、单LED 亮度256级可调 测距模块 红外深度传感器(ToF) TOF最大测量距离 1.2m(室内,白色目标) |
2. 功能模块介绍
(1)基于视觉的环境感知
大多数的生产生活环境都十分复杂,准确地感知工作环境的各种信息,对于机器人顺利完成任务起着至关重要的作用。巡检机器人的工作环境具有复杂性和动态性,对于机器人应对复杂场景和多变任务的能力提出了更高的要求。基于视觉的环境感知,尤其是以深度学习为核心的视觉感知技术,其感知机理更加贴近于人类的视觉感知机理,视觉信息相比其他信息蕴含着更为丰富的场景结构、场景语义等信息,有效的特征提取、语义抽象使其在复杂动态场景中仍能够表现出很高的准确性。本设备采用以视觉为核心的多传感器、多模态信息融合技术,有效地削弱了环境中的噪声干扰,增强了对非结构环境的适应性。通过深度学习获得的目标检测与行为识别能力,提升视觉传感器的核心感知作用,使感知功能“物美价廉”,且方便部署,有利于大规模推广应用。
(2)空-地协同建图与定位
面向生产环境中大尺度、高动态、弱标识复杂环境,引入智能化环境感知与定位方法。本设备融合了多方面建图定位技术,包括高精度低时延感知定位计算单元设计、空-地协同多机器人地图创建技术、高动态环境下多信息融合定位技术。利用空-地协同建图与定位技术,解决了单一构型巡检机器人在地图创建过程中因视角受限造成的地图空洞、缺失等问题。通过多传感器信息融合定位技术,提升了机器人在动态环境下的定位质量。
(3)空-地协同路径规划
本设备引入了动态环境下的空地协同路径规划方式,加强了多构型机器人之间的配合协作能力,解决了单一构型巡检机器人在移动过程中因视角盲区及不合理路径所导致的碰撞隐患,提升巡检机器人在动态环境中对各类障碍物的处理能力,保证机器人的安全性与可靠性。本设备深度融合了无人车与无人机的全局路径规划与路径寻优、动态避障算法。
(4)事故的检测与预警
通过无人机与无人车上搭载的视频摄像头,感知周围环境,进行火焰与烟雾识别工作,并可以通过视觉完成传统仪表的读数,实现数据采集功能。本设备还开发了智能视觉识别算法,可以完成对生产区域内人员的动作行为的识别检测。根据采集数据分析各个设备、人员等的动态行为,建立动态模型,探求有效的算法,对系统发生的故障进行及时诊断,对事故进行有效预测。


长按屏幕识别二维码
打开手机扫描二维码